2、Lidar avoiding
Function package:~/transbot_ws/src/transbot_laser
Introduction of lidar obstacle avoidance:
-Set lidar detection angle and response distance -After turning on the trolley, the trolley drives in a straight line without obstacles
-Determine the direction of obstacles appearing in the car (front left, front right, straight ahead) -Respond to the position of the obstacle in the car (turn left, turn right, turn left in a big circle, turn right in a big circle)
- Set lidar detection angle and response distance
- After turning on the robot, the trolley drives in a straight line without obstacles
- Based on the robot, determine the direction of the obstacle (front left, front right, straight ahead)
- Let the robot react according to the position of the obstacle (turn left, turn right, turn left for long time, turn right for long time)
2.1、Instructions
Start up
roslaunch transbot_laser laser_Avoidance.launchDynamic debugging parameters
xxxxxxxxxxrosrun rqt_reconfigure rqt_reconfigure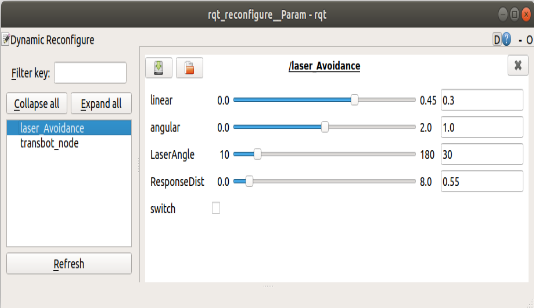
Parameter analysis:
| Parameter | Range | Analysis |
|---|---|---|
| 【linear】 | 【0.0,0.45】 | Linear speed of robot |
| 【angular】 | 【0.0,2.0】 | Angular speed of robot |
| 【LaserAngle】 | 【10,180】 | Lidar detection angle (angle of left and right side) |
| 【ResponseDist】 | 【0.0,8.0】 | Robot response distance |
| 【switch】 | 【False,True】 | Robot movement【start/pause】 |
[Switch] Click the box in front of [switch], the value of [switch] is True, and the car will stop. [Switch] The default is False, and the car moves.
View node
xxxxxxxxxxrqt_graph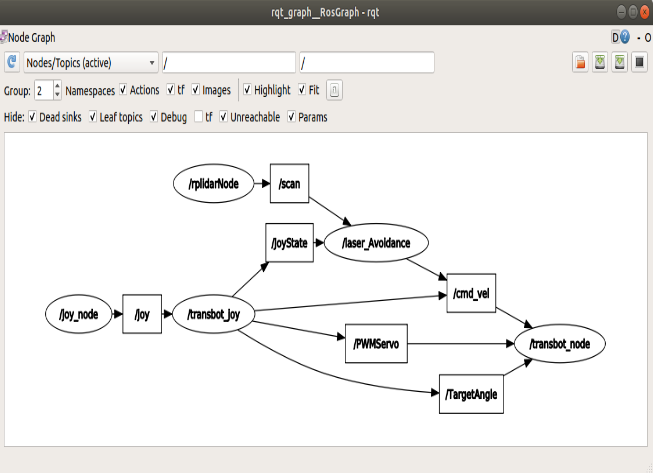
2.2、Source code analysis
launch file
- base.launch
x
<launch> <!-- Start the lidar node--> <include file="$(find rplidar_ros)/launch/rplidar.launch"/> <!-- Dynamic debugging tool node --><!-- <node pkg="rqt_reconfigure" type="rqt_reconfigure" name="rqt_reconfigure" output="screen"/>--> <!-- Start the car chassis drive node--> <node pkg="transbot_bringup" type="transbot_driver.py" name="transbot_node" required="true" output="screen"> <param name="imu" value="/transbot/imu"/> <param name="vel" value="/transbot/get_vel"/> </node> <!-- Handle control node --> <include file="$(find transbot_ctrl)/launch/transbot_joy.launch"/></launch>- laser_Avoidance.launch
x
<launch> <!-- Start base.launch file--> <include file="$(find transbot_laser)/launch/base.launch"/> <!-- Start the lidar obstacle avoidance node --> <node name='laser_Avoidance' pkg="transbot_laser" type="laser_Avoidance.py" required="true" output="screen"/></launch>py code:~/transbot_ws/src/transbot_laser/scripts/laser_Avoidance.py
xxxxxxxxxx if self.front_warning > 10 and self.Left_warning > 10 and self.Right_warning > 10: # print ('1、turn right') ... ... elif self.front_warning > 10 and self.Left_warning <= 10 and self.Right_warning > 10: # print ('2、turn left') ... ... if self.Left_warning > 10 and self.Right_warning <= 10: # print ('3、turn right') ... ... elif self.front_warning > 10 and self.Left_warning > 10 and self.Right_warning <= 10: # print ('4、turn right') ... ... if self.Right_warning <= 10 and self.Left_warning > 10: # print ('5、turn left') ... ... elif self.front_warning > 10 and self.Left_warning < 10 and self.Right_warning < 10: # print ('6、turn right') ... ... elif self.front_warning < 10 and self.Left_warning > 10 and self.Right_warning > 10: # print ('7、turn right') ... ... elif self.front_warning < 10 and self.Left_warning > 10 and self.Right_warning <= 10: # print ('8、turn right') ... ... elif self.front_warning < 10 and self.Left_warning <= 10 and self.Right_warning > 10: # print ('9、turn left') ... ... else: # print ('10、advance') ... ...According to the obstacle, the position of appearance, set up the different state of the trolley.
Source code parameter analysis:
| Parameter | Defaults value | Judgment |
|---|---|---|
| self.front_warning | Defaults is 0 | When the value is greater than 10, there is an obstacle ahead. |
| self.Left_warning | Defaults is 0 | When the value is greater than 10, there is an obstacle in the front left. |
| self.Right_warning | Defaults is 0 | When the value is greater than 10, there is an obstacle in the front right. |